作者:维尔克斯 时间:2026-1-4 10:21:51
引言
膝关节作为人体主要承重关节,一旦受损或发生病变将严重影响正常活动。膝关节手术涉及大量需在毫米尺度精确切除的病灶,例如骨软骨瘤切除、半月板修复、关节清理及韧带重建等(1-3)。以遗传性多发性骨软骨瘤(HMO)为例,这一典型膝关节疾病是一种常见于儿童与青少年的遗传性疾病,临床表现为良性骨肿瘤形成,可能导致骨骼异常突起并引发畸形、骨折甚至恶性病变等并发症(4-5)。约0.5%的人群在青少年时期需通过骨软骨瘤切除术治疗良性HMO。然而,由于膝关节腔结构复杂且空间受限(间隙宽度常小于10毫米),实现膝关节周围病灶的微创切除极具挑战(6-7)。
传统膝关节病灶切除通常依赖关节镜与手术器械(如骨钳、磨钻等)(8-9),这类手术常需通过厘米级切口进行操作。现有单功能、刚性且笨重的器械难以精准定位病灶,易导致正常组织损伤和粗糙创面,进而引发术中损伤并影响青少年骨骼发育(10)。具有柔性末端与高效操控方式的微型医疗机器人,为实现精准微创手术提供了突破方向(11-13)。
小型铁磁软体连续机器人凭借其远程导航与导向能力,在抵达深部狭窄区域方面展现出显著潜力(14-16)。为实现更稳定、安全且符合临床需求的操控,将可编程机器人操控器与磁控系统结合,可实现对医疗设备的机器人化驱动(15)。相较于气动、液压及缆线驱动型连续体机器人,磁驱机器人具有响应快速、安全性高及易于微型化的优势(17)。然而,由于缺乏能高效消融软硬生物组织的能量传输装置,磁驱机器人在病灶切除领域的应用仍待探索。中红外(MIR)CO₂激光因在生物组织中具有极高吸收系数,被广泛认为可实现精准安全的生物组织处理(18-19),尤其可通过分束器光纤束耦合光纤设备实现能量传输。临床广泛使用的10.6微米CO₂激光是目前最稳定高效的激光源之一(20-21),其高功率与高光束质量特性可实现高效快速的生物组织处理,并获得平整的消融表面。为实现精准高效的生物组织处理,学界致力于获得最小且最均匀的光斑(22-23)。此外,光纤的瓦级CO₂激光功率阈值是决定生物组织消融效果的关键因素(17)。然而,由于缺乏兼具柔韧性、鲁棒性及高光束质量与功率阈值的中红外光纤,基于光纤的高效CO₂激光消融技术尚未在微创手术中获得广泛应用(20)。
近年来出现的多材料光纤通过优化柔韧性与光学性能,有效解决了传统裸玻璃光纤与空芯光纤存在的机械脆性及输出激光畸变问题(24-29)。这种先进光纤同时为微纳尺度结构调控提供了多功能平台,可优化光纤的光学与机械性能(30-32)。面对精准手术中机器人微型化与智能化的趋势,多材料光纤已成为集成治疗、驱动与传感等多功能模式的强大平台,为开发小型磁驱中红外激光消融机器人创造了条件(33-38)。然而,当前高性能多材料中红外光纤的设计与制备技术,在实现磁驱机器人微型化及中红外激光能量传输模块高效集成方面仍存在挑战,阻碍了其在膝关节病灶切除中的应用。
武汉国家实验室(WNLO)的中国研究团队近期成功研发出一款创新柔性光纤机器人(含六边形衍射分束器),该柔性光纤机器人(含六边形衍射分束器)可通过磁性弹性体包裹的多芯光纤结构,利用分束器光纤束耦合传输CO2激光。这种磁导纤维机器人利用六边形排列的光纤芯,借助以色列Holo/Or CO2激光分束器(型号MS-587-A-Y-X)将激光能量耦合至光纤芯,磁导纤维机器人(含10.6um激光分束器)可执行原位激光消融手术。磁导纤维机器人(含六边形衍射分束器)能量传输能力达到单根中红外光纤的七倍以上,使该柔性光纤机器人(含10.6um激光分束器)成为具有实际应用价值的骨组织消融手术工具。
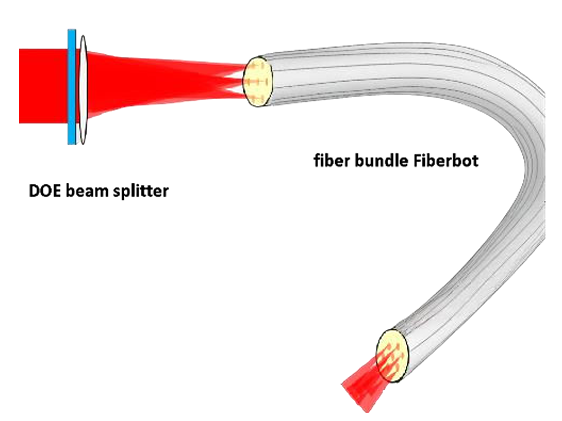
Holo/Or CO2激光分束器使用示意图
传统手术方法(包括开放式手术和关节镜辅助手术)在处理膝关节疾病时,仍面临器械灵活度不足的挑战。机器人技术虽已显著提升众多外科手术的精确度与效率,但当前仍缺乏能够灵活切除膝关节病灶的微创手术工具。本文提出一种集成可操控中红外激光消融与主动导航功能的柔性纤维机器人(含Holo/Or CO2激光分束器)。该机器人(含10.6um激光分束器)采用内置多芯结构中红外激光传导系统与外覆磁弹性体结构,利用分束器光纤束耦合激光,可在施加磁场环境下实现精确操控。实验证明,该纤维机器人能在受限球形模型及离体猪膝关节中完成精确导航与转向,并在大鼠活体腿部骨骼实验中成功实现可操控激光消融。凭借其紧凑结构、更安全的驱动机制及快速操控特性,本纤维机器人有望为未来膝关节手术开辟新路径。
为解决上述医疗机器人设计与制造难题,本文提出一种柔性磁驱多材料纤维设备(下文统称“纤维机器人”),其集成了主动导航与可导向CO₂激光能量输出功能,专用于精准膝关节手术(图1A)。通过多材料光纤热拉策略,将中红外激光玻璃、热塑性聚合物及弹性体等功能材料集成于单根光纤中。纤维机器人的中红外激光传输能力源于其内部低损耗、高功率、高光束质量的多芯结构。外覆磁弹性体基质涂层使其能在磁场驱动下,于狭窄膝腔环境中导航定位,并输出高质量中红外激光束消融病灶。通过受限球形模型与离体猪膝关节实验,我们验证了纤维机器人在曲折狭窄环境中的导航能力;进一步通过大鼠活体腿部骨骼实验,评估了其在动物骨组织中的高效激光消融与导向能力。相较于传统膝关节手术器械,纤维机器人提供了微创、高效且灵活可控的解决方案,有望显著提升手术效果。
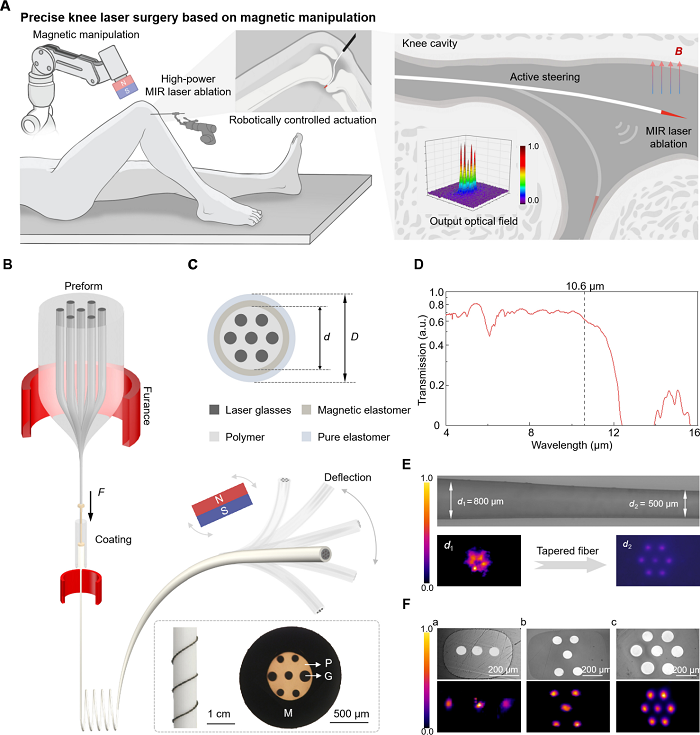
图1. 用于精准膝关节激光手术的磁驱多材料纤维机器人的结构、功能、制备与性能
(A) 磁驱多材料纤维机器人进行膝关节激光手术的示意图。纤维机器人通过微小切口进入人体,在外加磁场(B)驱动下实现在狭窄膝关节间隙中的导航与转向,继而输出中红外激光消融病灶。激光输出方向通过磁场(B)调控以实现精准消融。上图插图为输出光场的三维图像。
(B) 纤维机器人制备流程:光纤热拉制、软磁弹性体基质涂层涂覆与固化。F表示活塞对注射器内软磁弹性体基质施加的作用力。随机排列的钕铁硼(NdFeB)颗粒在脉冲磁场(~2.5 T)作用下磁化并实现定向排列。插图为所得纤维机器人缠绕于直径约10毫米特氟龙杆的实物照片及纤维机器人横截面。P代表聚合物,G代表激光玻璃,M代表磁弹性体基质。
(C) 典型多材料纤维机器人结构示意图[外径(D)]。纤维机器人内部材料[直径(d)]由激光玻璃与聚合物构成。
(D) 通过傅里叶变换红外光谱仪测得的纤维机器人(长度约20厘米)传输光谱。6.4 μm处的吸收峰归属于H2O键的振动。a.u.为任意单位。
(E) 光纤热锥拉锥工艺示意图。后续插图为拉锥前后光纤中红外光强场分布;对应光纤直径分别为d1(800微米)与d2(500微米)。
(F) 多芯扁平光纤横截面照片:(a)三芯光纤,(b)五芯光纤,(c)七芯光纤。下方照片为通过红外相机获得的对应输出光场。
实验结果
1、纤维机器人的优化设计与可扩展制造
为满足膝关节手术的特殊需求,我们设计并制备了多材料纤维机器人。通过热拉策略(详见图1B及材料与方法)成功制备出磁驱多材料纤维机器人。多材料光纤热拉策略有助于构建多样化多芯结构,这对调控光纤输出中红外光场及功率阈值至关重要,可适应临床膝关节环境并满足外科医生的精准需求。
如图1C所示,磁驱多材料纤维机器人由内至外依次由中红外激光玻璃、聚合物、磁弹性体及纯弹性体构成。为确保纤维机器人具备稳定、低损耗的CO₂激光传输能力,我们选择碲基硫系玻璃作为导光材料。热塑性聚合物(如聚苯砜树脂)的引入增强了纤维机器人的机械强度与柔韧性,且不影响其操控性。通过双坩埚法制备了具有光滑芯-包界面的高质量玻璃棒(图S1A),将这些中红外玻璃棒嵌入通过机械加工制备的热塑性聚合物护套中(图S1C),随后在室内拉丝塔中将预制棒热拉成光纤。所得光纤可稳定传输波长高达约11微米的激光(图1D)。
纤维机器人涂层主要由软弹性体基质(即Ecoflex)及均匀分散的硬磁金属合金微颗粒[即钕铁硼]构成(39)。为解决钕铁硼颗粒与Ecoflex构成的弹性体磁基质表面粗糙问题,我们涂覆了约20微米厚的Ecoflex界面层以增强疏水性与生物相容性(详见材料与方法)。弹性体复合材料的杨氏模量处于千帕量级,约250微米厚的弹性体复合外壳提供机械缓冲,从而最大程度降低导航过程中压迫神经与血管组织的风险(40)。最后,涂覆磁弹性体基质的纤维机器人经强脉冲磁场磁化,最终获得磁驱多材料纤维机器人。
调控光纤光场的方法之一是控制纤芯直径。本文采用光纤热锥化后处理策略,可均匀减小纤芯直径从而控制光场输出。当纤芯直径逐渐减小至满足单模传输条件的30微米时,光纤输出光场从多模转变为单模。例如,将各激光通道的芯径从50微米减小至30微米(对应光纤外径分别为800微米d1与500微米d2),可使输出光场更加均匀规整,尽管需要权衡功率阈值的降低(图1E)。
另一种调控光纤光场的方法是优化多芯光纤设计。基于对称波导结构设计,我们提出了三种扁平中红外多芯光纤,通过在同一光纤中增加通道数量以提升激光传输功率阈值:并列三芯光纤(a)、方形五芯光纤(b)与六边形七芯光纤(c)(图1F)。通过微调通道数量与激光通道排列等结构参数,可轻松调控光纤的输出光场与功率阈值,从而更好适应外科医生的临床需求。与传统圆形连续体机器人相比,扁平聚合物内置护套理论上可增强方形纤维机器人在正交方向的磁响应能力(41)。理论上这些多芯光纤的输出功率阈值为单芯传输功率阈值与芯数的乘积。但激光玻璃的脆性意味着过多通道会牺牲光纤柔韧性。其中六边形七芯光纤在柔韧性、鲁棒性、瓦级CO₂激光输出功率阈值和优异输出光束质量之间实现了最佳平衡。
本研究为确保与商用光纤耦合系统更好兼容,制备并测试了圆形六边形七芯光纤(直径约500微米;图1B插图)。纤维机器人结构简化为导光层[激光玻璃与聚合物;直径(d)]与磁响应层[弹性体;外径(D)]。所得七芯纤维机器人具有七个激光能量传输通道,各通道芯径30微米、包层直径90微米、芯间距120微米、弹性体基质厚度250微米,总外径1000微米。这些尺寸可高效调整以适应单模激光输出并确保与膝腔的高兼容性。基于七芯光纤的纤维机器人红外光强分布通过红外相机获取,由此得到纤维机器人输出的光斑形态与强度分布(图S3A)。图S3A右侧标尺表示归一化光场强度。纤维机器人末端与观察屏距离约3毫米。纤维机器人输出的各高斯光束强度均匀,基本匹配光纤内激光传输通道分布,呈现六边形排列。各光传输通道的输出光斑强度遵循高斯分布且均匀一致(图S3B、C)。中心光斑强度约为最大强度的85%(图S3D)。强度差异主因包括分光器不同衍射级次引起的束流能量变化,以及纤维机器人内部激光耦合效率差异。各高斯光束的半高全宽为200-250微米。在1-5毫米工作距离(纤维机器人输出端与目标物体间距)下,光斑直径始终小于1.5毫米(图S3E)。
2、纤维机器人在组织消融中的性能表征:多种激光模式与激光能量传输稳定性结果
在临床膝关节手术环境中,高效、性能稳定的医疗设备对提升手术成功率、防止术中损伤至关重要。激光能量在生物组织上的分布对激光消融效率具有重要影响。一般而言,高斯分布的基础激光模式具有更优的束流聚焦特性,可产生更精准、更洁净的消融表面。为说明改进的纤维机器人激光束对手术消融效率的影响,我们分别使用多模光纤、单模光纤和多芯光纤,对比了单模激光、多模激光及多路单模激光在离体猪软骨组织上的消融结果(图2A)。本研究构建了基于磁驱多材料纤维机器人的手术医疗系统原型,以验证纤维机器人在离体动物组织消融中的效能(图S2)。所有光纤样品均通过光纤热拉策略制备,长度为20厘米(该长度完全满足人体膝关节手术需求)。各类光纤的输出功率阈值分别为0.42W、0.82W和1.12W,对应输入功率为0.91W、1.68W和2.5W。超过该阈值将导致光纤端面烧毁。离体猪软骨组织的激光照射时长设置为20秒。
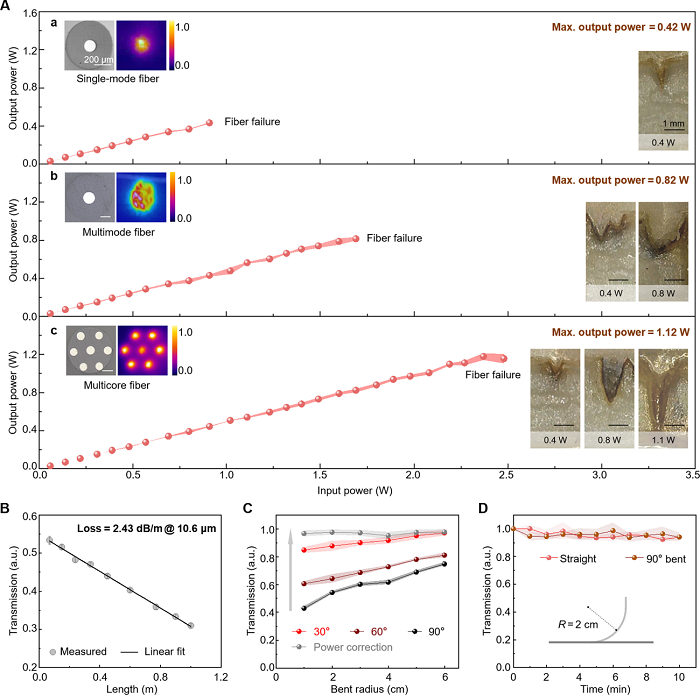
图2. 磁驱多材料纤维机器人中红外激光能量传输的激光消融与光学稳定性表征
(A) 单模光纤(n=3个独立样本)、多模光纤(n=3个独立样本)及多芯单模光纤(n=3个独立样本)的传输性能。(a)(b)(c)左上角插图分别对应单模光纤、多模光纤与多芯光纤的横截面及输出中红外光场;右侧插图为不同功率下离体猪软骨组织的消融截面。max.表示最大值。
(B) 纤维机器人在10.6μm波长的直通光学损耗(n=3个独立样本)。
(C) 30°(n=3个独立样本)、60°(n=3个独立样本)及90°(n=3个独立样本)弯曲纤维机器人在不同弯曲半径(R)下的传输性能(所有数据均已归一化处理)。通过提升纤维机器人输入功率(功率校正)可实现稳定输出功率。
(D) 直通纤维机器人(n=3个独立样本)与2厘米弯曲半径下90°弯曲纤维机器人(n=3个独立样本)随时间变化的传输稳定性(所有数据均已归一化处理)。
单模激光组织消融可获得整洁精准的消融界面。然而,单模光纤有限的功率阈值导致消融深度较浅,无法满足手术需求[图2A(a)]。提高功率阈值的一种可行方案是扩大光纤横截面的导光面积。多模光纤的纤芯直径约60微米,超过了光纤中单模传输所需的30微米阈值。如图2A(b)插图所示,多模光纤的输出不仅包含基模,还存在高阶模,导致激光能量分布不均。尽管多模光纤具有更大的模场面积,对应约0.82W的功率阈值,但多模激光产生的组织消融坑仍显示粗糙度和明显组织凝固,这可能阻碍术后组织恢复与愈合。相比之下,纤维机器人(七芯光纤)可在单根光纤内同时传导七束单模激光束,在将功率阈值提升至1.12W的同时实现精准高效的组织消融,如图2A(c)所示。激光消融深度的精度由波长、脉冲宽度、功率及曝光时间等激光参数共同决定。在0.4W、0.8W和1.1W输出功率下分别获得0.6毫米、2.2毫米和3.5毫米的消融深度,证明了激光对切割深度具备精确控制能力。实测多芯光纤功率阈值略低于理论值,主要源于光纤端面的耦合损耗。
为验证柔性纤维机器人传输高功率CO₂激光的能力,我们开展了一系列光学表征实验。纤维机器人的光学损耗(包括直通损耗与弯曲损耗)是评估激光能量传输稳定性的关键参数。低光学损耗表明纤维机器人对激光能量的吸收或泄漏极少。通过截断法测得10.6μm波长下直通光纤的光学损耗为约2.43dB/m,对应20厘米长纤维机器人可高效传输约89%的激光能量至输出端(未计及光纤端面菲涅耳反射损耗)(图2B)。
考虑到纤维机器人在膝腔内不可避免会发生弯曲,我们评估了其在1-6厘米弯曲半径、30°/60°/90°弯曲角度下的传输性能,以确保CO₂激光能量的稳定传输(图2C)。纤维机器人(长度约30厘米)甚至可在不同曲率下实现90°弯曲。实验表明纤维机器人可实现1厘米的小弯曲半径且具有优异弯曲稳定性,在2.5厘米弯曲半径下弯曲损耗约1.12dB。在光纤弯曲场景中,可通过适当增加输入激光功率实现功率校正,从而维持输出激光功率稳定,该机制已在弯曲光纤传输测量中得到初步验证。结合光纤形状传感技术,克服临床手术中因光纤弯曲导致输出功率不稳定的挑战至关重要(17)。此外,我们测量了纤维机器人在直通状态及2厘米半径90°弯曲状态下持续10分钟的输出功率稳定性,验证其可长期保持稳定运行(图2D)。
真实膝关节手术环境中,高湿度及生理盐水冲洗可能影响纤维机器人的耐久性与激光消融稳定性(42)。为评估其在此类条件下的耐久性,我们测试了纤维机器人经长时间盐水浸泡后的光学性能。结果表明即使浸入盐水24小时后,纤维机器人仍能保持稳定传输(图S4A)。鉴于中红外激光在水中的高吸收性,可行的手术方案可在关节腔盐水冲洗与激光消融间交替进行。盐水可通过关节镜配套的抽吸设备完全清除。得益于疏水性,纤维机器人表面仅会附着微量水分,且残留于光纤端面的液滴会在消融过程中因吸收中红外激光而快速蒸发。为评估持续高湿环境对纤维机器人激光输出稳定性的影响,我们采用盐水雾化装置(产生20微米直径液滴,速率0.1毫升/分钟)在纤维机器人输出端营造高湿环境,并将功率计置于距输出端3毫米处。如图S4C所示,尽管存在盐雾干扰,纤维机器人仍能向目标传输≥1W的功率,且红外相机观测显示其光场分布未出现明显畸变。
针对纤维机器人在手术操作中持续形变的特点,我们进行了循环弯曲测试以评估其机械完整性(长度=20厘米,D=1000微米)。在1厘米和5厘米变形量下经历100次循环后,纤维机器人的光学性能未受影响(图S4D)。一旦解除轴向载荷,纤维机器人即可弹性恢复。与现有用于CO₂激光消融的柔性多材料光纤相比,我们基于低损耗中红外玻璃材料及优化多芯结构设计的光纤,在膝关节环境中实现了更优异的光学性能、柔韧性和临床适应性(表S1)(22,24,28,30,31,43–46)。
3、磁驱纤维机器人的力学特性与磁响应性能
在磁驱纤维机器人的临床操控中,对其磁场响应性、安全性、疏水性及柔韧性均有严格要求。纤维机器人由外部磁弹性体基质、内部激光玻璃和热塑性聚合物构成。外部磁弹性体基质赋予其磁响应能力,磁性源于嵌入弹性体基质中的硬磁钕铁硼颗粒(图3A)。L表示纤维机器人的无约束长度,可通过外部磁场(如永磁体或电磁体)进行操控(详见图3B和影片S1)。此外,最外层的纯弹性体包覆层为纤维机器人提供了安全性与疏水性(图3C)。在均匀磁场(B)中,纤维机器人的偏转角度(θ)遵循基本公式,可表示为(14,34,47):
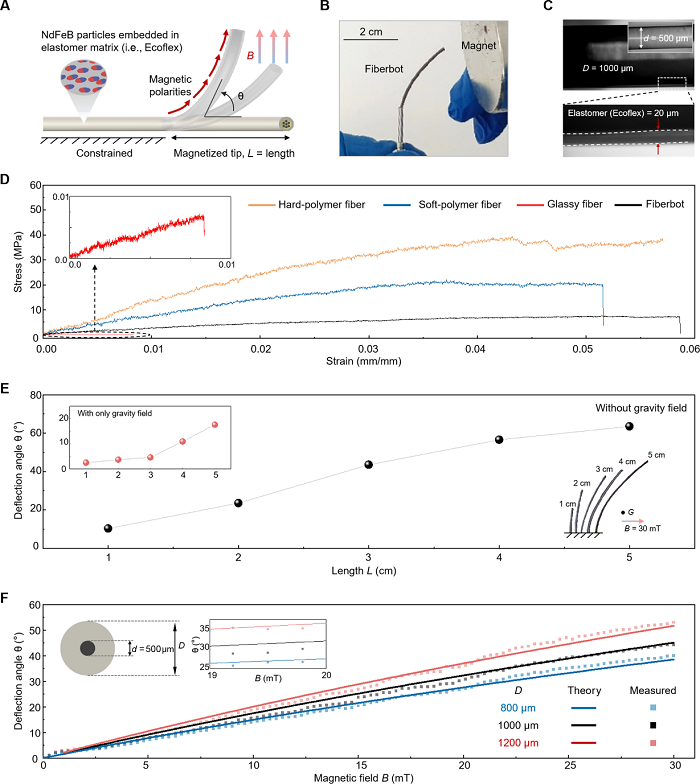
图3. 纤维机器人的力学特性与磁响应性能
(A) 沿轴向均匀磁化的磁驱多材料纤维机器人示意图:在垂直施加的均匀磁场B作用下向磁场方向偏转。L表示纤维机器人的无约束长度,θ表示自由端曲线切线与参考方向间的偏转角。
(B) 手持圆柱形磁体吸引纤维机器人的实物照片。
(C) 纤维机器人侧壁显微图像,虚线标示纯弹性体边界。
(D) 硬质聚合物光纤、软质聚合物光纤、玻璃光纤及磁驱纤维机器人的实测应力-应变曲线。
(E) 在重力场垂直观测平面(视作忽略重力场)且30mT磁场垂直纤维机器人主体并平行观测平面条件下,不同磁化端长度的偏转角(D=1000μm)。左上插图为重力场平行观测平面且垂直纤维机器人主体时的偏转角,右下插图显示偏转纤维机器人照片。
(F) 特定组分(30体积分数)在不同d/D比值(0.4/0.5/0.6)条件下,当L/D=30且d=500μm时,有限元模拟预测与实验测量的偏转角随外加磁场(B)变化曲线。插图为19-20mT磁场强度下纤维机器人的偏转角。
4、磁驱纤维机器人的主动导航与导向能力验证
为验证磁驱纤维机器人在外加磁场下的可控性,我们通过系列实验评估其主动导航与运动控制能力。这些实验旨在考察纤维机器人在模拟生物环境与真实生物组织(特别是受限球形三维模型及离体猪膝关节)中的精准导航与导向能力。该性能对于验证其在精准膝关节骨软骨瘤切除等微创手术中的应用潜力至关重要,其中精确控制与灵活操纵是成功的关键。
实验采用轴向磁化的圆柱形钕铁硼磁体(N52级),半径6厘米、高度3厘米。磁体几何中心至操作目标的距离超过4.45厘米,施加磁场强度始终低于30mT。图S6B展示了考虑膝关节平均尺寸与解剖位置后,圆柱磁体在膝周的工作距离。对于半径约5厘米的类球形膝关节,使用圆柱磁体进行手术模拟可确保纤维机器人的磁响应性能。此外,我们引入定制多关节机械臂支撑并控制磁体,以减轻操作者疲劳并实现比手持磁体更高的操作精度(图S7)。相较于机器人机械臂,该定制多关节机械臂还能让操作者更快响应并缩短学习时间。磁体外各位置的磁场强度、方向与空间梯度均固定。基于非均匀磁场下纤维机器人操控的现有模型,通过调整驱动距离、旋转角度与自旋角可实现对其精确控制。在吸引/排斥模式下,可通过改变工作距离与磁体旋转角来调节纤维机器人偏转角。固定工作距离与旋转角时,同样可通过调整磁体自旋角控制偏转。此外,通过控制机械臂关节活动范围,可限制纤维机器人的工作区域,从而降低手术风险并避免正常组织损伤。
为验证纤维机器人在曲面上的主动导航与导向能力,我们在受限球形三维模型(直径约10厘米,间隙宽度约10毫米)中展示了其导航与导向功能。尽管该模型经过简化,真人膝关节具有更复杂的异质结构,包含肌肉、软骨、血管等多种组织,这些固有差异增加了纤维机器人实际应用的复杂性。为此,我们在模型中设置了不均匀分布的3毫米直径孔洞,以更好模拟真实手术环境中的复杂几何结构与约束条件,从而严格检验纤维机器人响应磁场实现精准操控的能力。图4A展示了纤维机器人利用其磁响应端部,沿外加驱动场方向穿越一系列环状结构的概念验证。我们在模型上预设了多个目标孔洞,对孔洞进行编号并规划了纤维机器人的行进路径(路径1与路径2),通过在磁体操控下精确引导纤维机器人末端方向(详见图4A、图S5C及影片S2)。该实验证明了纤维机器人遵循复杂路径并精准定位特定位置的能力。
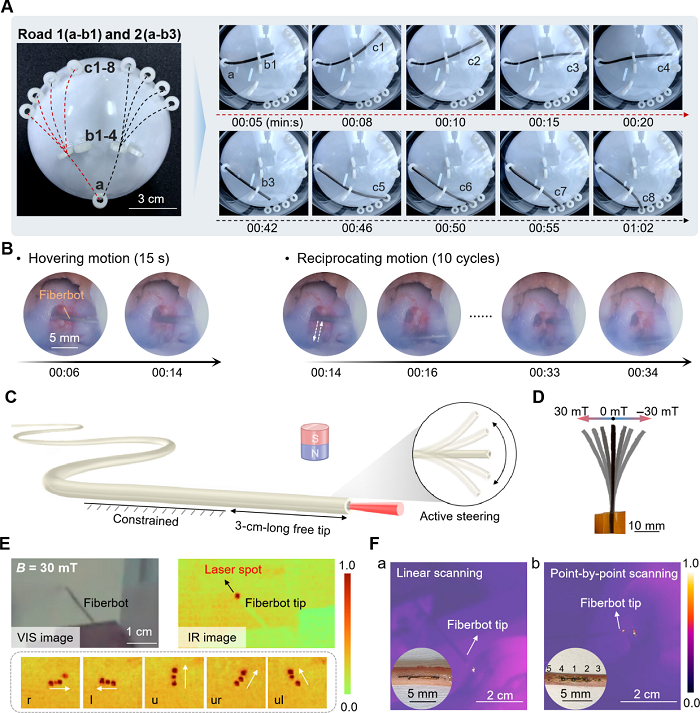
图4. 磁驱纤维机器人的主动导航与可操控中红外激光消融
(A) 预设纤维机器人运动路径规划图。红色与黑色虚线分别代表路径1(a-b1)与路径2(a-b3)。右图为纤维机器人(D=1000μm)在受限球形三维模型中沿预设路径1(a-b1)和2(a-b3)进行磁控导航的实况。
(B) 离体猪膝关节腔内纤维机器人的运动控制,包括悬停与往复运动。
(C) 采用柔性磁驱纤维机器人的可操控中红外激光消融实验装置。纤维机器人无约束段长度为3厘米。
(D) 施加正向与反向磁场后纤维机器人偏转状态图像。为便于区分,图像采用叠加呈现方式。
(E) 输出激光光斑沿不同方向移动轨迹的可见光与红外图像:左(l)、右(r)、上(u)、左上(ul)、右上(ur)。
(F) 大鼠活体腿部骨骼的线性扫描消融(a)与逐点扫描消融(b)结果。在逐点扫描模式下,纤维机器人按点1至点5顺序对目标点进行消融。
文章来源:Y. Zou, Y. Liu, Y. Li, L. Yang, Y. Liu, K. He, Y. Xiang, J. Ouyang, P. Li et al., Magnetically actuated multimaterial fiberbot for precise minimally invasive knee laser surgery. Sci. Adv. 11(35), adt1809 (2025). https://doi.org/10.1126/sciadv.adt1809